Preface to Modeling and Bond Graphs
The solution of the real-world problem is based on modeling (Figure 1.). In this process the attention is focused on the problem properties that are considered more important for the solved problem, negleckting the other that are deemed less influential. This depends on the problem being solved, but also on the knowledge of people problem trying to solve it.
There are different kind of modeling. We are interested in the modeling based on mathematics, i.e., the mathematical modelling. The problems we are interested most belongs to Mechatronics, i.e. synergistic combination of Mechanical, Electrical and Computer Systems. The resulting mathematical models are in the form of algebraic and ordinary differential equations. Solving the models we obtain the results that we interpret in terms of the real processes.
One well-known approach to to modeling multidisciplinary engineering dynamic systems is by Bond Graphs, which was developed by Henry Paynter. These are diagrams that describe systems made of various kinds of components. The one thing that all these components have in common is power. Energy can flow from one component to another. The rate of energy flow is called "power", and bond graphs make easy to keep track of it. The classic theory of Bond Graphs is described in Karnopp el al . To make Bond Graphs more powerful and easier for use the approach was modified in Mechatronics by Bond Graphs in two senses:
• The concept of causality of Bond Graphs is completely rejected. The resulting mathematical model can now be more general and contains coupled algebraic and ordinary differential equations, or shorten DAE. Thus, solving the causility conflicts, which typically appear in Bond Graph models, e.g., due to algebraic loops, do not appear now.
• By generalizing concept of component Word Model the systematic model developmed and model build up are supported. Thus, the objects which the current problem concern is dividid into two groups: the System and its Environment (Figure 2.).The environment affects the system behaviour. The system consists of several interactiong objects. They may interacts with environment as well, but this is one-way. Thus, e.g., when standing on the floor, it restrict our possible vertical motion. On the other hand, our weight acts to the floor trying to deflect it. If consider that the floor is idealy rigid, i.e. we neglect its deformation under our weight, we may assume that point below our feet has zero vertical velocity irrespective of our weight. If we want to include the floor deformation into account we have to include the floor among the system objects. We may proceed further and decompose every of this objects into simpler parts, and continue until we reach the components that are the simple one. We may also develop the model by building-up the system model of already pre-developed component models from the library.
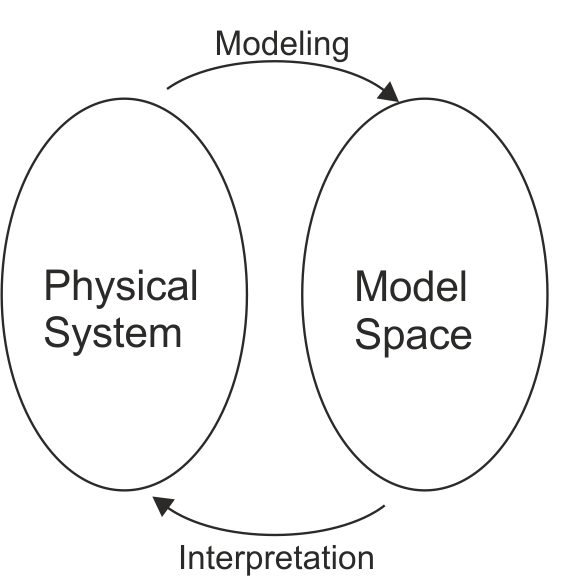
Figure 1. Modeling Approach
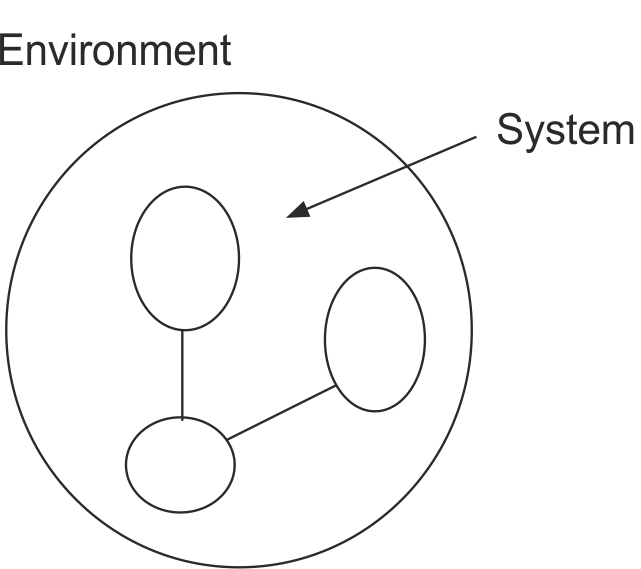
Figure 2. System and its Environment